



Project information
- Category : Robotics
- Team Supervisor : SO/E Shri. Pranab Singha Roy
- Team members : Amit Barman, Aaryaman Choudhury, Paramita Naskar
- Project date : 10 September, 2024
- Project URL : Click here for report
Short Details and Specifications
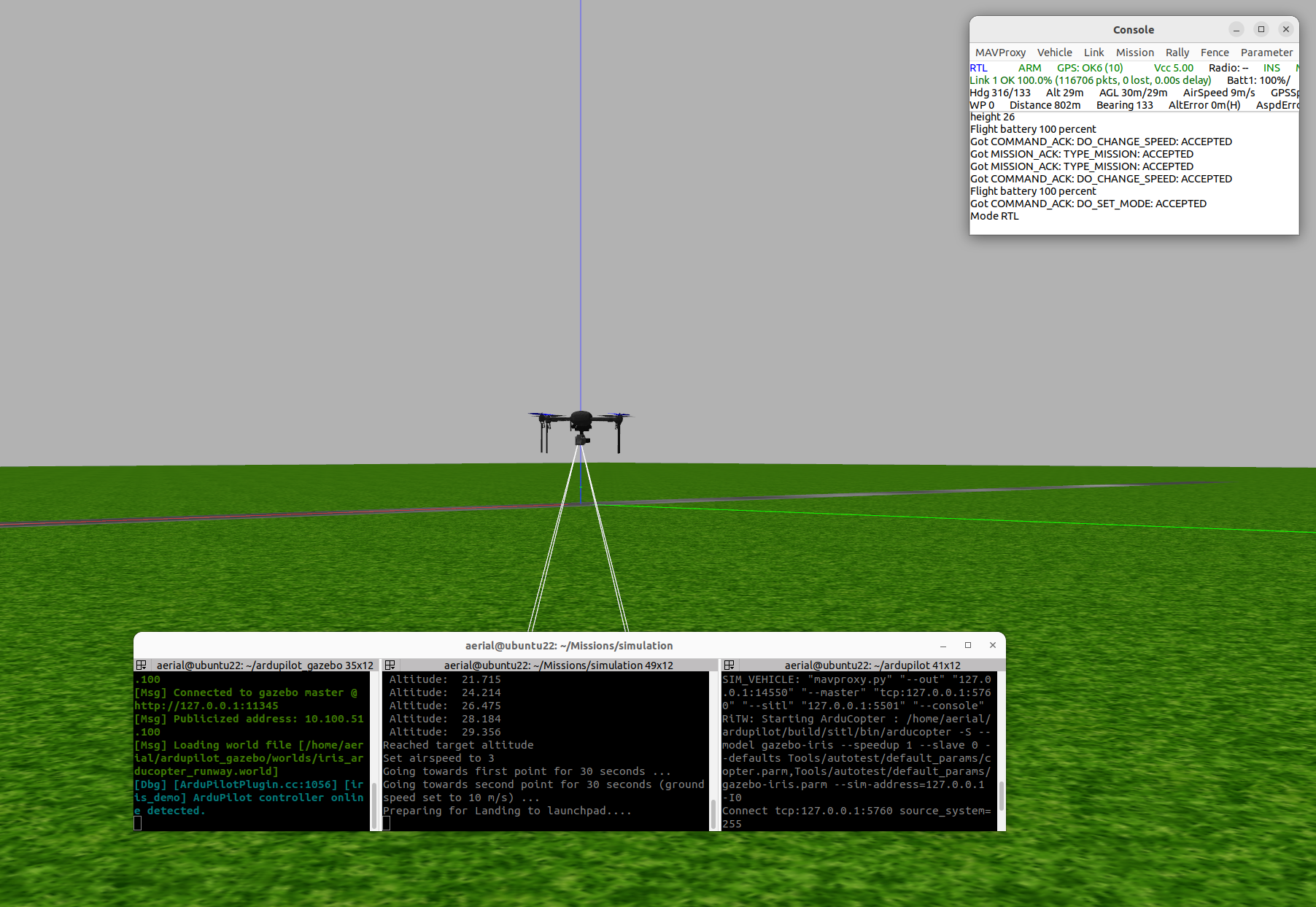
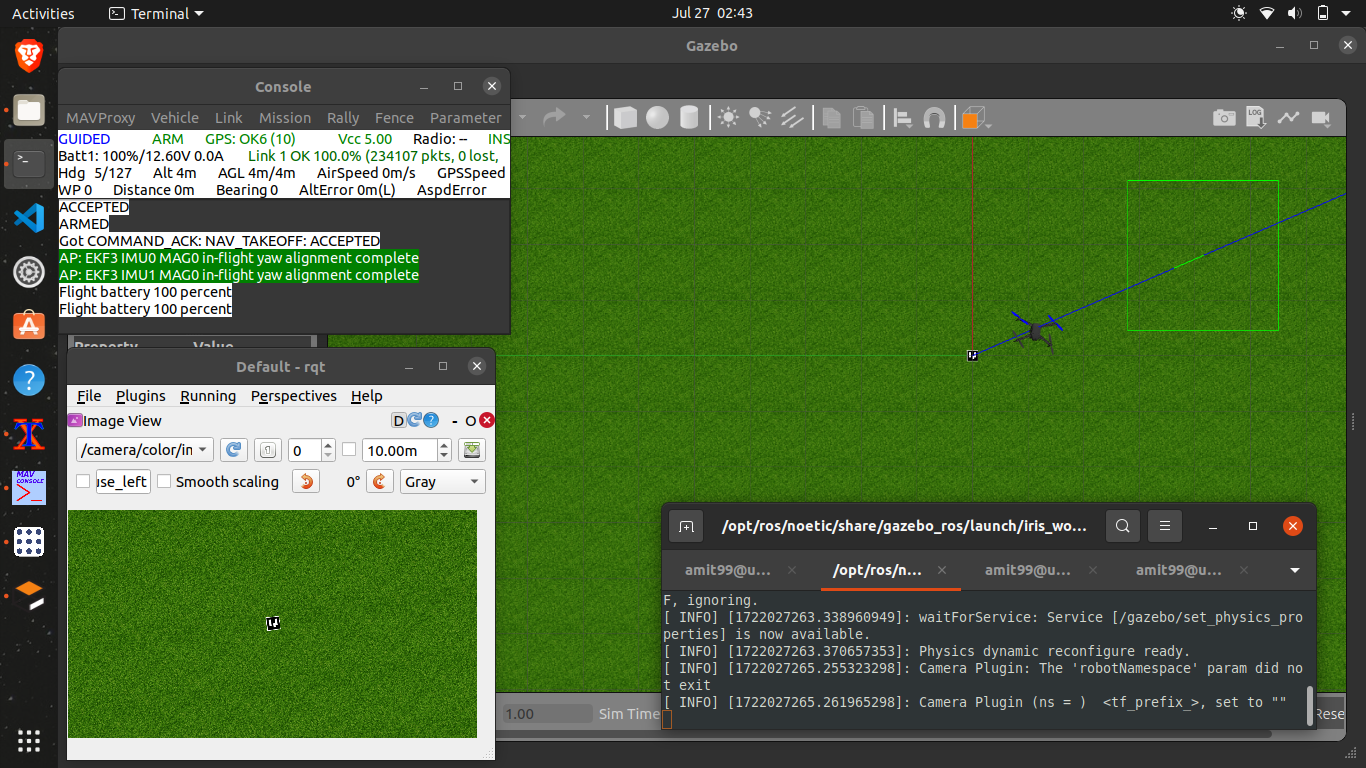
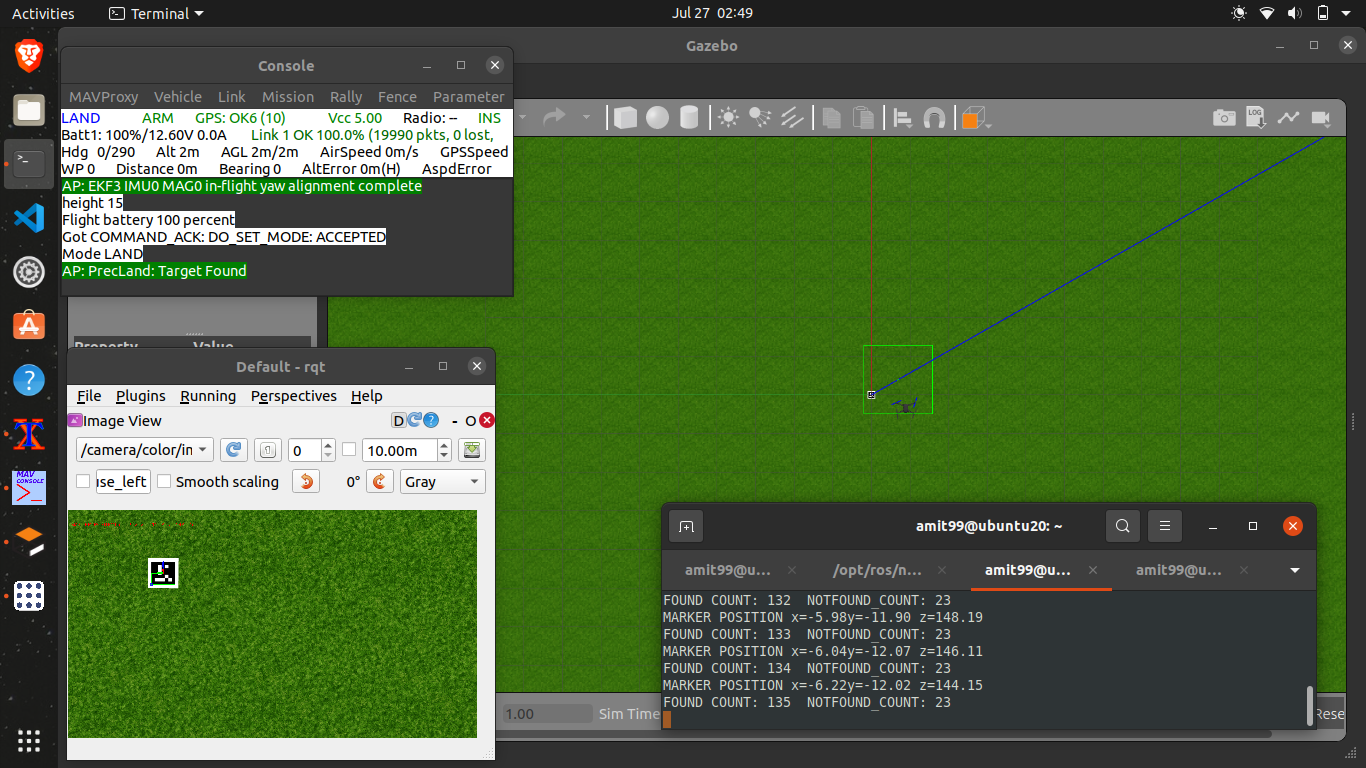
In recent years Quadcopter has been used in many applications such as military, security & surveillance, service delivery, disaster rescue and much more due to its flexibility of flying. In this report, Quadcopter will be used for it's basic operation and some enhancment operation which will be used in future for Points cloud Mapping of Electromagnetic Radiations inside a Cyclotron Chamber between many locations that is received from the Ground station. The Quadcopter will execute an autonomous flight using the concept of companion PC. Raspberry PI 3 (RPI3) will control the Quadcopter by command the controller of the drone (Navio 2 & Pixhawk) by using DroneKit-Python API to send MAVLink messages to the Ardupilot. This concept is useful to perform some additional tasks like Precison landing on Aruco marker to the autopilot and provide such a smart capability like image processing, real time Quadcopter data plotting using GUI and path planning which cannot be done by the flight controller alone. Basically, the idea has been stimulated and the code has been tested by using the SITL Simulator with MAVProxy under Ubuntu 20.04 environment. The result of controlling the Quadcopter using Python script was excellent and give a motivation to implement the same script on a real Quadcopter. The implementation on real Quadcopter was perfect as it has given the same behavior as the SITL drone in the simulation.